Из-за плохого сигнала в помещении GPS невозможно использовать для определения местоположения в помещении. Тем не менее, спрос на позиционирование внутри помещений широк, и во многих приложениях необходимо определять положение людей или объектов внутри помещения, особенно при управлении складами.
TOF-дальномерность — это алгоритм радиочастотного (РЧ) позиционирования, который относится к технологии двустороннего измерения. Он использует сигналы данных о времени полета между передатчиком и приемником для измерения расстояния между двумя точками.
Шаги измерения:
1. Измерьте временной интервал между отправкой ведущим сигналом данных и получением ответного сигнала подчиненного, обратите внимание на Tt.
2. Измерьте интервал времени между ведомым устройством, получающим сигнал данных от ведущего устройства, и отправкой ответного сигнала, обратите внимание на Tr.
3. Время прохождения сигнала в одну сторону между ведущим и ведомым: Tf=(Tt-Tr)/2. Расстояние между двумя точками: d=c*Tf, c представляет скорость распространения электромагнитной волны.
SX1280 — это чип дальномера 2,4G, основанный на модуляции LoRa, недавно выпущенный компанией Semtech. В дополнение к широко используемым функциям беспроводной связи, SX1280 также имеет функцию определения дальности TOF (времяпролетного измерения).
Преимущество:
Алгоритм интегрирован в чип, и результаты измерения расстояния можно получить с помощью простых операций, которые пользователи могут использовать для быстрого определения местоположения в помещении.
План реализации:
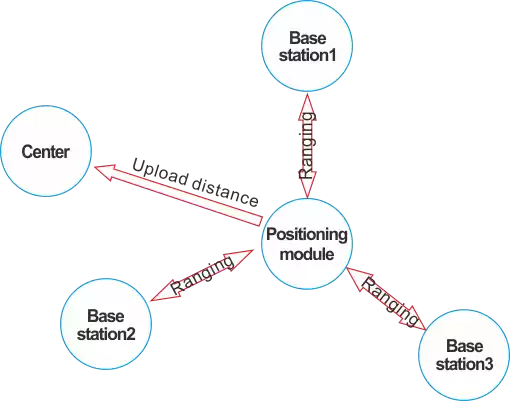
Для этого алгоритма требуется как минимум 5 беспроводных модулей с чипом SX1280, один центр, три базовые станции и как минимум один модуль позиционирования.
◆ Центр отвечает за получение и подсчет информации о расстоянии от модуля позиционирования и ее загрузку на сервер.
◆ Три базовые станции, используемые в качестве ведомых при определении дальности, должны быть равномерно установлены на складе, чтобы модуль позиционирования мог рассчитать расстояние.
◆ Модуль позиционирования устанавливается на товары, которые необходимо обнаружить, центр измеряет расстояния между тремя базовыми станциями отдельно (состояние дальности) и загружает эти три расстояния в центр (состояние связи).
Конкретные шаги заключаются в следующем:
1. Модуль позиционирования находится в состоянии приема.
2. Центр отправляет инструкцию по получению информации о местоположении модулю позиционирования.
3. Модуль позиционирования переключается в состояние измерения дальности.
4. Модуль позиционирования измеряет расстояние до базовой станции 1 и определяет расстояние d1.
5. Модуль позиционирования измеряет расстояние до базовой станции 2 и определяет расстояние d2.
6. Модуль позиционирования измеряет расстояние до базовой станции 3 и получает расстояние d3.
7. Модуль позиционирования переключается в состояние связи.
8. Модуль позиционирования загружает d1, d2, d3 в центр.
9. Центр загружает на сервер d1, d2 и d3.
 Russian
Russian 

 +86-755-23080616
+86-755-23080616 sales@nicerf.com
sales@nicerf.com")

